



HyperIMU陀螺仪修复器是一个非常好用的陀螺仪修复工具,可以更加清楚的了解到相关的参数数据,定义相关功能服务等等,支持两种网络协议,包含了TCP,UDP传感数据,可以将文件集中进行脱机处理,轻松查看运行时的信号图,功能很全面,可自定义设置参数,HyperIMU支持永久连接,人性化简洁无广告的界面操作,可以帮你将你的设备变成功能强大的传感器。用户只需将软件与设备进行连接,就能进行简单的操作!

软件特色
1、对于陀螺仪,软件具备超频处理功能,可进行个性化调整。
2、hyperlmu修复陀螺仪广泛兼容多种平台,适用于各类型游戏。
3、内置自动修复机制能迅速解决常见错误,提高修复效率。

软件功能
1、支持两种常见的数据格式,无论你的数据是哪种格式,这款软件都能轻松应对。
2、可以根据自己的需求,手机上自定义传感器列表,实现数据的流式传输。
3、支持多种网络流协议,如UDP和TCP,确保数据在不同网络环境中的稳定传输。

软件亮点
1、多功能性,可以满足不同用户的需求;
2、修复效率高,能够快速解决游戏问题;
3、稳定可靠,可以保证游戏运行的稳定性。
软件魅力
1、重新校准陀螺仪:
打开设备的设置菜单,查找包含“陀螺仪”的选项。
选择“重新校准”功能,并根据设备提供的指导完成一系列动作,确保操作环境稳定。
2、更新或重置软件:
如果问题是由软件错误导致的,首先尝试更新操作系统的最新版本和相关应用程序。
如果更新无法解决问题,考虑将设备恢复到出厂设置的选项。
3、检查硬件连接和电源供应:
确认陀螺仪是否正确连接到了电路板上,并且有稳定的电力供应。
如果发现连接松动或有接触不良的情况,清洁接触点后重新插拔连接线。
4、寻求专业帮助:
如果上述所有步骤都无法解决问题,建议联系专业技术人员进行检查。
专业技术人员可能会需要进一步检查内部硬件组件,以便准确识别故障原因并进行必要的维修工作。

推荐理由
1.功能非常齐全,可以为用户解决游戏运行中的各项问题。
2.支持语言切换功能,满足不同用户的语言需求。
3.页面设计十分简洁,给用户最优质的视觉体验。
4.后台系统很强大,不会出现卡顿闪退现象。
5.可以自定义更改后台参数,画质,音效等等都可以自由更改。
6.使用过程没有任何的垃圾广告干扰,给用户最绿色的使用环境。

怎么用
1、使用过程中,定要在后台停止游戏启动,然后给您进行修改,然后再玩游戏,查则没有效果
2、部分倍率的灵敏度没有修改成功,即本地不存在该倍率的灵敏度配置信息(游戏默认值)

3、需要在游戏中随意调节倍率灵敏度参数,让本地游戏保存倍率灵敏度设置配置信息,然后退出游戏打开本软件进行修改

4、修改成功后,点击“_”号进行微调。不要点击“”或拖动调节条,否则灵敏度会再次降至400以下。

软件优势
1、能够进行陀螺仪的超频处理,进行个性化调节;
2、支持多种平台,可适用于各种游戏;
3、内置常见错误自动修复机制,有效提高修复效率;
4、可以自动备份游戏数据,防止数据丢失。
调整方法
1、检查镜头视场角是否存在异常;
2、确认陀螺仪方向标定是否正常,正常矫正后数据应在 0 上下震动;
3、核实在线零偏是否处于正常状态;
4、防抖模式选用录像模式,即 record 或 ipc 模式;
5、确认陀螺仪数据组数是否正常:
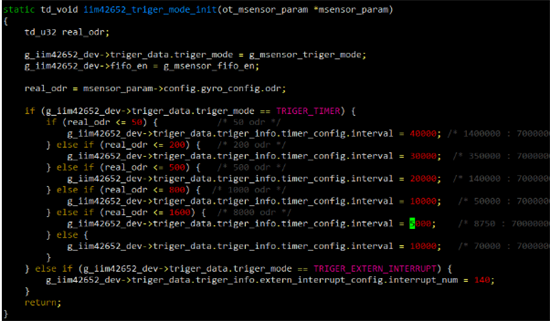
5.1、测试用 iim42652 陀螺仪,fifo 模式取数据,1000HZ 采样率间隔 5ms,hi3516dv500 需按厂家说明配置,测试时 50ms 一次易缺失数据;
5.2、hi3516dv300 中 vi 获取的陀螺仪数据,设置裁剪坐标后在 vpss 进行裁剪;
6、防抖效果测试宜在曝光时间小于 10ms 时进行,过短效果不佳;
7、默认 spi 通信 10M 数据,i2c 数据低可能导致数据获取不及时;
8、vi chn 开低延时会使陀螺仪防抖画面缩放,关闭即可解决。
常见问题
1、采样率是什么,和灵敏度一样吗?
答:采样率是陀螺仪每秒回报数据次数,与灵敏度无关。采样率高反应快,但会增加发热耗电,需自行权衡;
2、为什么实际采样率和设置的略微不一致?
答:实际采样率会被安卓系统量化处理,如 81-100Hz 区间设置,实际采样率均为 100Hz;
3、最大采样率是多少?
答:由陀螺仪硬件决定,一般至少 200Hz,将采样率拉满可启用最大采样率;
4、有除了发热耗电之外的副作用吗?
答:高采样率可能让 CF 手游内辅瞄变弱,机制不明且时有时无;
5、一定得进游戏前启动本 APP,才能生效吗?
答:任何时候启动都可立即生效,陀螺仪采样率会马上提升。
原理分析
物体旋转时,不受外力影响则旋转轴方向不变,可用于测量角位移或角速度。
1、核心工作原理:角动量守恒定律
系统合外力矩为零时角动量保持不变。角动量是物体矢径与动量的叉积:
(1) 矢量计算:点积 a・b=abcosθ(标量),叉积 a×b=absinθ(矢量,方向由右手螺旋定则确定);
(2) 角动量计算:r 为矢径(到旋转中心距离与方向),p 为动量(mv,方向与线速度一致),示例中 L 方向竖直向上;
(3) 陀螺角动量守恒:无空气阻力、接触面极小时,合外力矩为 0,角动量守恒。
2、陀螺仪的基本特性:
(1) 定轴性:转子高速旋转且无外力矩时,自转轴指向稳定,反抗轴向改变;
(2) 进动性:转子高速旋转时,外力矩作用于外环轴则绕内环轴转,作用于内环轴则绕外环轴转,转动方向与外力矩垂直。
3、测量的物理量:
(1) 角速度:测量偏转、倾斜时的转动角速度;
(2) 方向:俯仰角(绕 x 轴)、偏航角(绕 z 轴)、翻滚角(绕 y 轴)。
4、核心参数:
通用参数(传感器):线性误差、分辨率、采样频率;
陀螺仪重要参数:量程(dps)、灵敏度(刻度因子)、初始误差、动态误差、非线性度、初始零漂、零漂温度系数。
5、惯性导航原理:
利用陀螺仪和加速度计测角速度与加速度,积分运算得速度和相对位置,结合初始位置,确定载体当前位置。
特别说明
软件信息
- 厂商:ianovir
- 包名:com.ianovir.hyper_imu
- MD5:202B816F2BAEA0E7D468F3A78FF46D20

 陀螺仪延迟修复器
陀螺仪延迟修复器
 陀螺仪MC
陀螺仪MC
 陀螺仪修复器7.0
陀螺仪修复器7.0
 陀螺仪超频助手最新版
陀螺仪超频助手最新版












 奇兔刷机手机版
奇兔刷机手机版
 GooglePlay官方正版
GooglePlay官方正版
 V-Appstore官方版
V-Appstore官方版
 Uptodown应用商店
Uptodown应用商店
 webview
webview
 百度网盘app
百度网盘app
 应用隐藏计算器
应用隐藏计算器
 OPPO浏览器
OPPO浏览器
 ES文件浏览器
ES文件浏览器