



使用教程
1、打开软件后,系统会弹出弹窗,需仔细阅读隐私协议,无问题即可进入下一步;

2、系统要求触摸绿色圆点,按照提示完成相应操作;

3、选择对应项目进行勾选,确保所选内容符合需求;

4、完成勾选后,系统将自动开展检测与校正工作。

软件亮点
1、界面设计简洁直观,操作便捷,可轻松完成陀螺仪检测、修复与校准;
2、提供个性化设置,能依自身需求调整界面布局、参数等,适配使用习惯;
3、在虚拟现实设备中,可自定义陀螺仪灵敏度与响应速度,优化使用体验;
4、注重数据安全,对用户数据加密存储与传输,防止泄露和篡改,保障隐私。
软件优势
1、检测陀螺仪状态:检查是否正常工作,排查漂移、延迟、无响应等问题;
2、校准陀螺仪:通过特定算法与步骤重新校准,消除偏差,提升感应精度;
3、调整采样率:可调整数据采样频率,平衡灵敏度、精确性与系统负担;
4、自定义参数设置:提供灵敏度、轴向调整等高级选项,适配不同应用场景;
5、修复潜在问题:尝试解决导致陀螺仪异常的软件或配置问题,恢复正常功能。
软件特色
1、稳定性与可靠性高:能在复杂环境下稳定运行,确保检测修复工作顺利开展;
2、具备游戏优化功能:提升游戏帧率与稳定性,减少卡顿掉帧,优化画面;
3、优化大型 3D 游戏体验:通过改善陀螺仪性能,提高游戏操控性与流畅度;
4、支持社区交流:可在社区分享使用经验、修复技巧与游戏心得,相互交流。
调整方法
1、检查镜头视场角是否存在异常;
2、确认陀螺仪方向标定是否正常,正常矫正后数据应在 0 上下震动;
3、核实在线零偏是否处于正常状态;
4、防抖模式选用录像模式,即 record 或 ipc 模式;
5、确认陀螺仪数据组数是否正常:
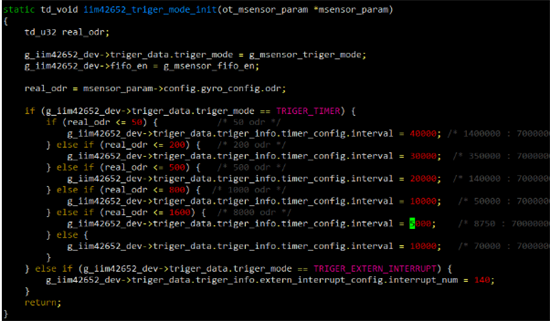
5.1、测试用 iim42652 陀螺仪,fifo 模式取数据,1000HZ 采样率间隔 5ms,hi3516dv500 需按厂家说明配置,测试时 50ms 一次易缺失数据;
5.2、hi3516dv300 中 vi 获取的陀螺仪数据,设置裁剪坐标后在 vpss 进行裁剪;
6、防抖效果测试宜在曝光时间小于 10ms 时进行,过短效果不佳;
7、默认 spi 通信 10M 数据,i2c 数据低可能导致数据获取不及时;
8、vi chn 开低延时会使陀螺仪防抖画面缩放,关闭即可解决。
常见问题
1、采样率是什么,和灵敏度一样吗?
答:采样率是陀螺仪每秒回报数据次数,与灵敏度无关。采样率高反应快,但会增加发热耗电,需自行权衡;
2、为什么实际采样率和设置的略微不一致?
答:实际采样率会被安卓系统量化处理,如 81-100Hz 区间设置,实际采样率均为 100Hz;
3、最大采样率是多少?
答:由陀螺仪硬件决定,一般至少 200Hz,将采样率拉满可启用最大采样率;
4、有除了发热耗电之外的副作用吗?
答:高采样率可能让 CF 手游内辅瞄变弱,机制不明且时有时无;
5、一定得进游戏前启动本 APP,才能生效吗?
答:任何时候启动都可立即生效,陀螺仪采样率会马上提升。
原理分析
物体旋转时,不受外力影响则旋转轴方向不变,可用于测量角位移或角速度。
1、核心工作原理:角动量守恒定律
系统合外力矩为零时角动量保持不变。角动量是物体矢径与动量的叉积:
(1) 矢量计算:点积 a・b=abcosθ(标量),叉积 a×b=absinθ(矢量,方向由右手螺旋定则确定);
(2) 角动量计算:r 为矢径(到旋转中心距离与方向),p 为动量(mv,方向与线速度一致),示例中 L 方向竖直向上;
(3) 陀螺角动量守恒:无空气阻力、接触面极小时,合外力矩为 0,角动量守恒。
2、陀螺仪的基本特性:
(1) 定轴性:转子高速旋转且无外力矩时,自转轴指向稳定,反抗轴向改变;
(2) 进动性:转子高速旋转时,外力矩作用于外环轴则绕内环轴转,作用于内环轴则绕外环轴转,转动方向与外力矩垂直。
3、测量的物理量:
(1) 角速度:测量偏转、倾斜时的转动角速度;
(2) 方向:俯仰角(绕 x 轴)、偏航角(绕 z 轴)、翻滚角(绕 y 轴)。
4、核心参数:
通用参数(传感器):线性误差、分辨率、采样频率;
陀螺仪重要参数:量程(dps)、灵敏度(刻度因子)、初始误差、动态误差、非线性度、初始零漂、零漂温度系数。
5、惯性导航原理:
利用陀螺仪和加速度计测角速度与加速度,积分运算得速度和相对位置,结合初始位置,确定载体当前位置。
特别说明
软件信息
- 包名:com.gyrofix
- MD5:80D00E58C5C28A2087DCF400C0FF565E



















 MCinaBox运行库文件
MCinaBox运行库文件
 熊队侠修改器
熊队侠修改器
 熊猫侠游戏修改器
熊猫侠游戏修改器
 螃蟹账号交易平台
螃蟹账号交易平台
 ak加速器
ak加速器
 233游戏乐园官方正版
233游戏乐园官方正版
 7723游戏盒子app
7723游戏盒子app
 顽皮兔app
顽皮兔app
 pubjatant画质修改官方版
pubjatant画质修改官方版